Commits on Source (2)
-
lucasgrelaud authoredfe7f3c14
-
lucasgrelaud authored
Ajout de deux scénarios basées sur le code initial de flax See merge request !1
bef49007

sw/scenarios/README.md
0 → 100644
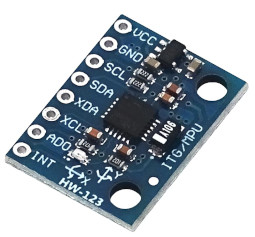
sw/scenarios/images/accelerometre.jpg
0 → 100644
{kind=link}
20.6 KiB
sw/scenarios/images/capteur_inclinaison.jpg
0 → 100644
{kind=link}

13.6 KiB